- Настраиваем виртуальный компорт в Ubuntu
- Заметки о Linux, электронике, радиолюбительстве
- воскресенье, 27 июля 2014 г.
- Работа с последовательным портом из консоли Linux
- Виртуальный последовательный порт для Linux
- Подключаем последовательные интерфейсы по IP
- Характеристики
- Виртуальный COM-порт
- Режим RFC 2217
- Режим P2P
- Уведомления о событиях
- Логирование через Syslog
- Первичная настройка
- Заключение
Настраиваем виртуальный компорт в Ubuntu
Удобно работать с виртуальной машиной XPSP3 в VirtualBox’е: когда надо включаешь её, когда не надо – выключаешь, всё очень быстро, и вирусы прочно экранируются. Но вот понадобилось внести изменения в отлаживаемую «виндовую» программу, работающую со старыми добрыми компортами. И тут обнаруживается: не работает компорт виртуальной машины. В ЛОРе нет хорошего ответа. Всё сводится к рекомендации создания новой машины, а это время. Западные пользователи на форумах тоже дают немало пустых советов. А на самом деле всё не так уж и сложно.
Сначала надо установить утилиту настройки аппаратного компорта хост-машины. Называется она setserial, в дистрибутивах Ubuntu её нет, но зато она есть в репозиториях, поэтому воспользуемся командой терминала:
sudo apt-get install setserial
И, конечно, запустим эту утилиту, чтобы посмотреть, присутствует ли на материнской плате, что собой представляет и как настроен аппаратный порт хозяйки (далее в примере исследуем COM1):
sudo setserial -g /dev/ttyS0
Учтите, что ttyS0 соответствует COM1, ttyS1 соответствует COM2 и т.д. согласно терминологии Линукса. Подставьте нужное. После ввода пароля суперпользователя в норме должен быть получен ответ:
/dev/ttyS0, UART: 16550A, Port: 0x03f8, IRQ: 4
Иначе компорт отсутствует или отключен на уровне BIOS’а хост-машины. Выключенный порт включаем. В случае отсутствия на материнской плате аппаратного компорта придётся поставить «костыль» из дополнительной PCI-платы расширения и добавить модуль его драйвера из прилагаемого к ней диска. Проверено: для Линукса драйверы раюотоспособны, но уточните номер появившегося компорта командой терминала
При необходимости параметры настройки коммуникационного порта можно откорректировать ( как именно – см. терминальной командой man setserial).
Настраиваем проключение виртуального COMn в аппаратный COMn, то бишь в файл ttySn+1. Для этого запускаем VirtualBox, НЕ ЗАПУСКАЯ ВИРТУАЛЬНУЮ МАШИНУ, и настраиваем параметры её компорта, как показано на этом скриншоте:
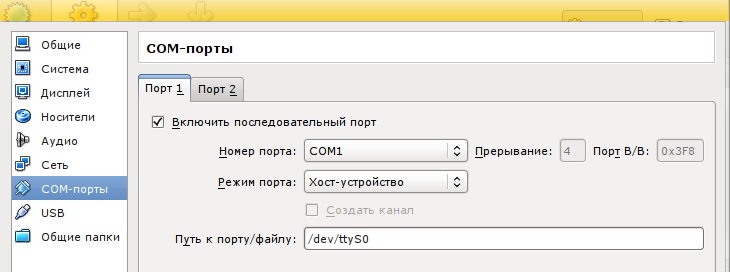
Здесь важно, чтобы номер порта, номер прерывания и адрес ввода-вывода совпадали бы с теми, которые проиндицировала утилита setserial. Если не совпадают, то утилита setserial поможет перенастроить параметры аппаратного компорта.
Но если вы сейчас попытаетесь запустить виртуальную машину, то с очень большой вероятностью получите ошибку. А всего-то надо сделать ещё две вещи.
Во-первых, вы, хотя и являетесь «главным администратором», не обязательно автоматически являетесь членом группы пользователей виртуальной машины. Удивительно? Но бывает нередко. Впрочем, эта нелепость устраняется легко. Чтобы не заморачиваться с CLI, установите с помощью эмулятора терминала великолепную утилиту gnome-system-tools (она есть в репозиториях) командой
sudo apt-get install gnome-system-tools
Данную утилиту рекомендую для многократного употребления, поэтому скопируйте из папки /usr/share/applications значок «Пользователи и группы» на рабочий стол и запустите эту утилиту из рабочего стола. Откроется окно «Параметры пользователей». Жмите кнопку «Управление группами», в открывшемся окне «Параметры групп» скроллингом отыщите группу vboxusers, выберите её и дважды щёлкните по ней. Откроется окно «Свойства группы vboxusers». Внутри панели «Члены группы» пометьте чекбокс напротив своего имени, отражающего вас, как пользователя системы.
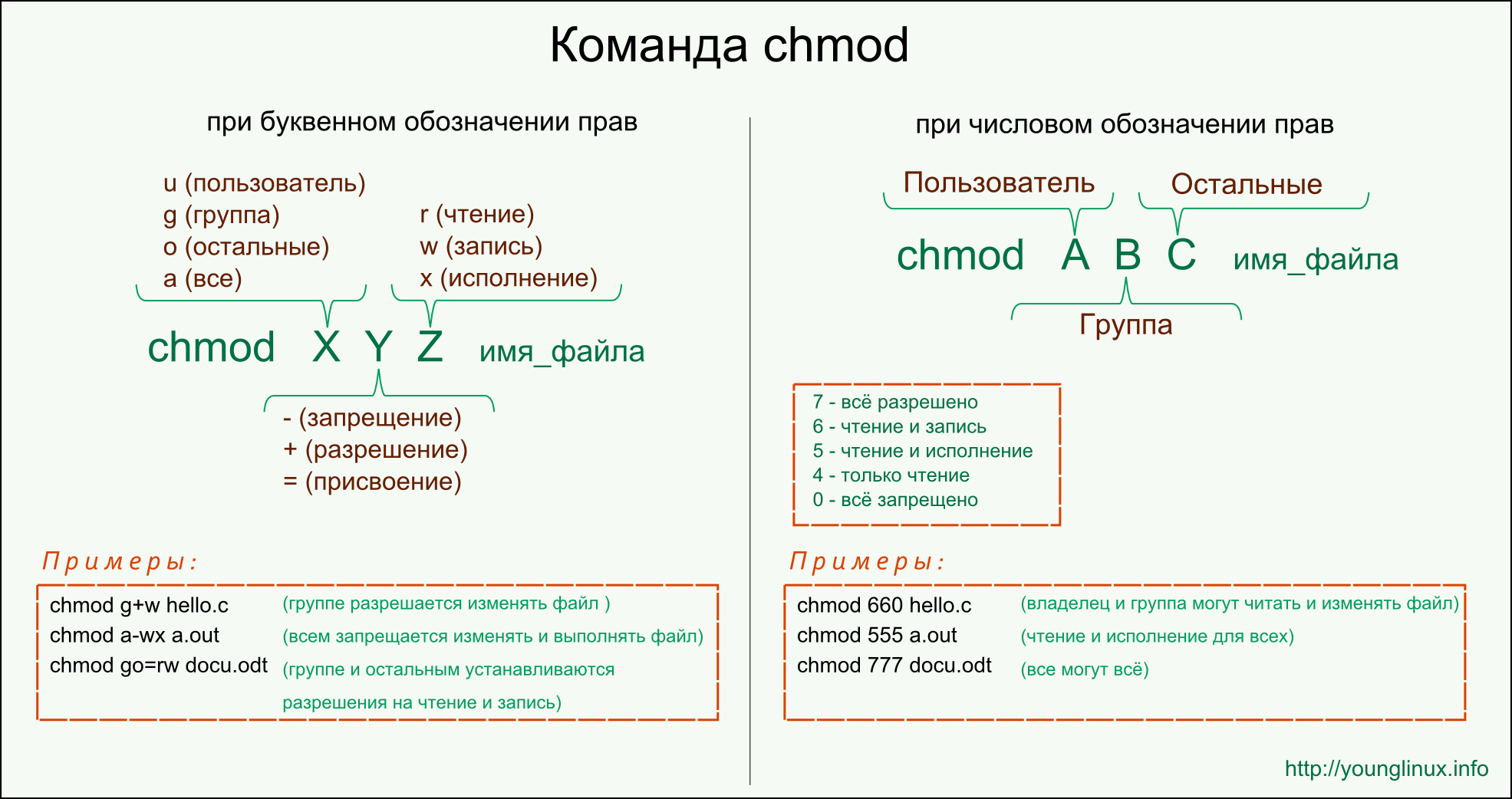
Во вторых, реальному порту следует присвоить права «666», что означает разрешение дуплексного обмена через компорт на уровнях владельца, членов его группы и остальных пользователей. Делается это командой
sudo chmod 666 /dev/ttyS0
Вместо ttyS0 подставьте обозначение нужного аппаратного компорта хост-машины. Вcё, теперь можно смело запускать виртуальную машину, включать привычный «виндовый» гипертерминал и с помощью виртуальной Windows настраивать модемы, управлять программаторами и т.д. Словом, делать всё то, как будто бы вы работали с реальной Windows XP или «семёркой». Успехов!
Источник
Заметки о Linux, электронике, радиолюбительстве
Личный блог Вадима Кузнецова, RA3XDH
воскресенье, 27 июля 2014 г.
Работа с последовательным портом из консоли Linux
В предыдущем посте было показано как запустить UART на отладочной плате Launchpad для MSP430. Теперь рассмотрим как общаться с платой при помощи средств командной строки Linux. Используется плата с прошивкой из предыдущего поста. Для подробностей — см. под кат
Как известно, все устройства последовательных портов представлены файлами устройств в каталоге /dev.Через эти файлы и происходит общение ОС Linux с внешним устройством на последовательном порту. Чтобы передать что-то на внешнее устройство нужно записать данные в файл устройства, а чтобы считать информацию из устройства — прочитать данные из файла устройства. Это можно делать при помощи команд cat и echo так же как для обычных файлов на диске. Или внутри программы на С при помощи вызовов ioctl(), read() и write() или библиотеки termios.
Физическим последовательным портам RS232, к которым подключались диалапные модемы на старых компьютерах, соответствуют файлы устройств /dev/ttyS*, начиная с /dev/ttyS0. Виртуальным последовательным портам, которые создаются различными конвертерами USB UART соответствуют файлы устройств /dev/ttyUSB* и /dev/ttyACM*. Ядро Linux автоматически разпознаёт подключенное устройство, загружает для него драйвер и создаёт файл устройства. Вручную устанавливать драйвер, как в ОС Windows не требуется. Например, если подключить к USB преобразователь USB UART FT232, то создаётся файл устройства /dev/ttyUSB0, с которым можно работать также как и с обычным последовательным портом. На плате Launcpad находится микросхема TUSB3410, которая тоже представляет собой конвертер USB UART. Если подключить её к USB, то создаётся файл устройства /dev/ttyACM0. Чтобы общаться с платой нужно что-либо писать/читать с этого файла.
Чтобы пользователь мог читать или писать в файл устройства последовательного порта, его нужно добавить в группу dialout. Иначе работать с последовательным портом сможет только администратор root.
Простейшим приложением с графическим интерфейсом, которое работает с последовательным портом, является CuteCOM. Он обычно уже есть в вашем дистрибутиве Linux. Его можно установить из репозиториев. При помощи CuteCOM мы работали с платой в предыдущем посте. Выглядит CuteCOM вот так:
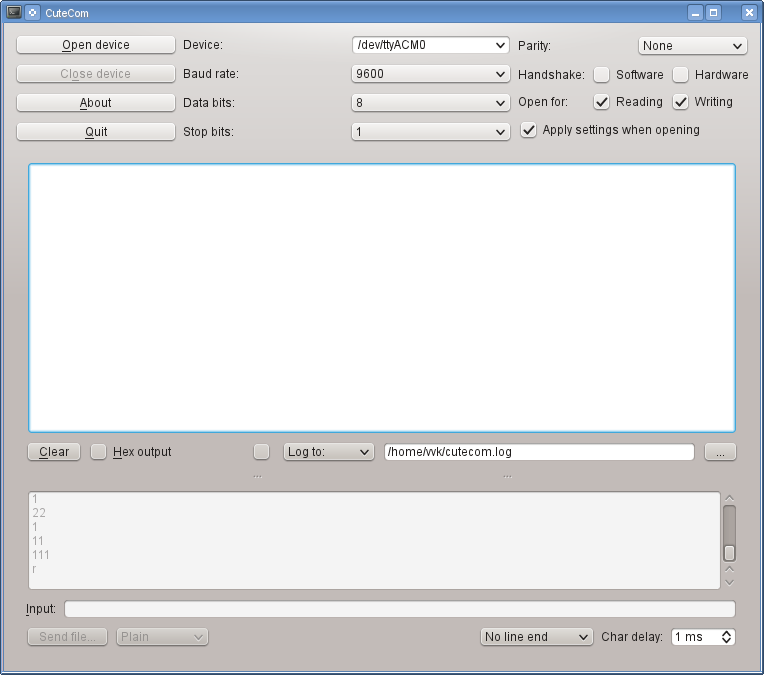
Работать с ним крайне просто. Указываем нужное устройство, если его нет в списке, то его можно впечатать вручную. Затем указываем скорость и параметры и нажимаем OpenDevice. В окне видим данные, которые пришли от устройства. В поле ввода в нижней части можем печать строку символов, которые предаются на устройство. Чтобы передать данный нажимаем Enter и смотрим ответ устройства в окне.
Теперь рассмотрим как работать с COM-портом из командной строки. Для этого служат три команды: stty, cat и echo.
Команда stty устанавливает параметры и скорость COM-порта. Её формат:
stty -F
Чтобы установить параметры для платы Launchpad для соединения на скорости 9600 нужно выполнить:
$ stty 9600 -F /dev/ttyACM0 raw -echo
Параметр raw устанавливает, что данные в компьютер передаются байт за байтом так же как приходят в порт без преобразований. Аппаратное управление потоком отключено. Подробнее о том, что включает и выключает raw — см. man stty. Если не включить raw, то скорее всего ничего работать не будет.
Теперь в той же консоли нужно набрать
$ cat /dev/ttyACM0
И можно смотреть данные, которые приходят от платы. Выход — нажать Ctrl+C.
Теперь нажимаем на плате RESET и видим, что в консоди напечатался текст.
Чтобы передать в плату данные, в другой консоли нужно использовать команду echo и перенаправление вывода в файл устройства. Наберём в другой консоли:
$ echo "1">/dev/ttyACM0
Видим, что на плате загорелся красный светодиод и в первой консоли было выдано сообщение об этом. Чтобы убрать конец строки в передаваемых данных, то нужно использовать запуск echo -n, а чтобы интерпретировать 16-ричные коды — нужно echo -e. Ключи можно комбинировать.
В итоге должно получиться так:

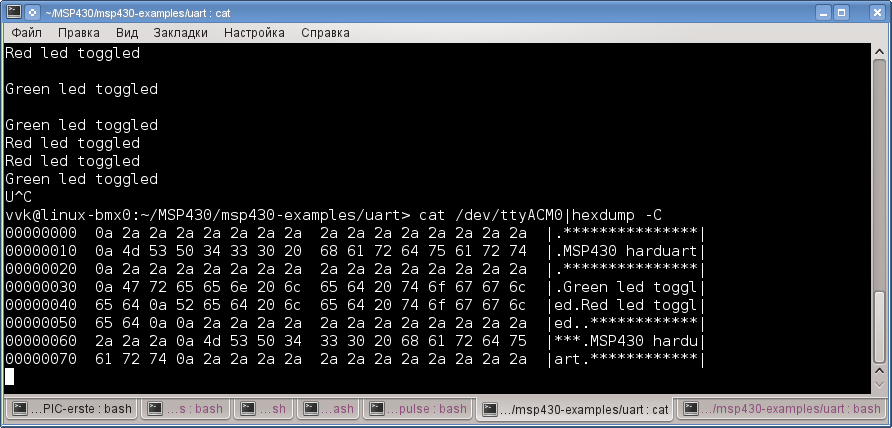
Чтобы увидеть 16-ричные коды данных, приходящих от устройства, нужно использовать команду hexdump:
$ cat /dev/ttyACM0|hexdump -C
Получится вот так:
Чтобы иметь вывод данных от устройство на экран и в текстовый файл нужно использовать tee:
Источник
Виртуальный последовательный порт для Linux
Мне нужно протестировать приложение последовательного порта в Linux, однако моя тестовая машина имеет только один последовательный порт.
Есть ли способ добавить виртуальный последовательный порт в Linux и протестировать мое приложение, эмулируя устройство через оболочку или скрипт?
Примечание: я не могу переназначить порт, он жестко запрограммирован на ttys2, и мне нужно протестировать приложение, как оно написано.
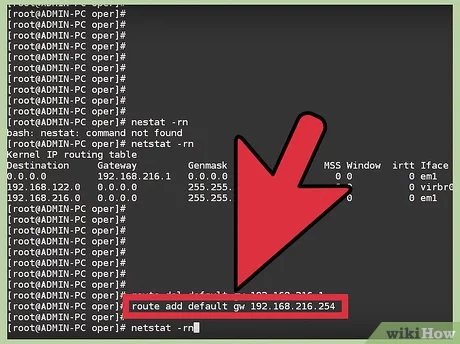
Для этого вы можете использовать pty («псевдотелетайп», где последовательный порт является «настоящим телетайпом»). С одного конца откройте /dev/ptyp5 , а затем прикрепите свою программу к /dev/ttyp5 ; ttyp5 будет действовать так же, как последовательный порт, но будет отправлять / получать все, что он делает, через / dev / ptyp5.
Если вам действительно нужно, чтобы он разговаривал с файлом с именем /dev/ttys2 , просто уберите старый /dev/ttys2 и создайте символическую ссылку с ptyp5 на ttys2 .
Конечно, вы можете использовать другое число, кроме ptyp5 . Возможно, выберите один с большим числом, чтобы избежать дублирования, поскольку все ваши терминалы входа также будут использовать ptys.
В Википедии есть дополнительная информация о ptys: http://en.wikipedia.org/wiki/Pseudo_terminal
Дополняя ответ @ slonik.
Вы можете протестировать socat для создания виртуального последовательного порта, выполнив следующую процедуру (проверено на Ubuntu 12.04):
Откройте терминал (назовем его Terminal 0) и запустите его:
Приведенный выше код возвращает:
Откройте другой терминал и напишите (Терминал 1):
имя порта этой команды может быть изменено в зависимости от компьютера. это зависит от предыдущего вывода.
вы должны использовать номер, доступный в выделенной области.
Откройте другой терминал и напишите (Терминал 2):
Теперь вернитесь в Терминал 1, и вы увидите строку «Тест».
Для этого используйте socat:
Также существует tty0tty http://sourceforge.net/projects/tty0tty/, который является настоящим эмулятором нуль-модема для Linux.
Это простой модуль ядра — небольшой исходный файл. Я не знаю, почему он получил отрицательные отзывы на sourceforge, но мне он подходит. Самое лучшее в нем то, что он также эмулирует аппаратные контакты (RTC / CTS DSR / DTR). Он даже реализует команды TIOCMGET / TIOCMSET и TIOCMIWAIT iotcl!
В недавнем ядре вы можете получить ошибки компиляции. Это легко исправить. Просто вставьте несколько строк вверху источника module / tty0tty.c (после включений):
Когда модуль загружен, он создает 4 пары последовательных портов. Устройства: от / dev / tnt0 до / dev / tnt7, где tnt0 подключен к tnt1, tnt2 подключен к tnt3 и т. Д. Вам может потребоваться исправить права доступа к файлам, чтобы иметь возможность использовать устройства.
Думаю, я немного поторопился со своим энтузиазмом. Хотя драйвер выглядит многообещающе, он кажется нестабильным. Я не знаю наверняка, но думаю, что это разбило машину в офисе, над которым я работал из дома. Я не могу проверить, пока не вернусь в офис в понедельник.
Во-вторых, TIOCMIWAIT не работает. Код, кажется, скопирован из какого-то примера кода «крошечного терминала». Обработка TIOCMIWAIT кажется на месте, но она никогда не просыпается, потому что соответствующий вызов wake_up_interruptible () отсутствует.
Авария в офисе действительно произошла по вине водителя. Отсутствовала инициализация, и полностью непроверенный код TIOCMIWAIT вызвал сбой машины.
Вчера и сегодня потратил на переписывание драйвера. Было много проблем, но теперь у меня все хорошо. По-прежнему отсутствует код для аппаратного управления потоком данных, управляемого драйвером, но он мне не нужен, потому что я сам буду управлять контактами, используя TIOCMGET / TIOCMSET / TIOCMIWAIT из кода пользовательского режима.
Если кому-то интересна моя версия кода, напишите мне, и я отправлю его вам.
Источник
Подключаем последовательные интерфейсы по IP
Последовательные интерфейсы RS-232/422/485 до сих пор очень популярны в промышленности: по ним подключаются диагностические порты, датчики, сканеры штрих-кодов и RFID меток и т.д. Однако последовательные интерфейсы имеют свои ограничения. Иногда возникает необходимость получить доступ к такому интерфейсу по IP-сети, или, например, иметь доступ к одному устройству с RS-232 с нескольких удаленных компьютеров одновременно, или объединить несколько удаленных объектов в одну шину RS-485.
Сервер последовательных интерфейсов конвертирует последовательные физические протоколы в IP-пакеты, и позволяет программно управлять ими — подключать удаленный виртуальный COM-порт к компьютеру по сети так, будто он подключен физически, и прозрачно соединять несколько устройств в режиме P2P, без использования компьютеров.
В статье мы разберем сервер последовательных интерфейсов Advantech EKI-1524, имеющий четыре последовательный порта, каждый из которых поддерживает протоколы RS-232/422/485, и два LAN-порта.

Сервер последовательных интерфейсов EKI-1524 имеет четыре порта DB9 и два LAN-порта.
- Виртуальный COM-порт — позволяет программно эмулировать виртуальный COM-порт удаленного устройства на системе Linux.
- Одновременное подключение нескольких клиентов — в режиме сервера дает возможность использовать один последовательный порт для нескольких устройств одновременно.
- Работа в режиме P2P — одновременная работа в режиме клиента и сервера позволяет объединить несколько EKI-1524 напрямую, без использования серверов и компьютеров.
Характеристики


Дополнительно представлены модели с повышенным уровнем защищенности, для работы в экстремальных условиях, и гальванической развязкой портов, для защиты от высоких напряжений: EKI-1522I, EKI-1524I, и другие.

Все модели поддерживают подключение двух источников питания. Переключение между источниками питания происходит без перезагрузки устройства. Реле индикации обрыва питания замыкается в случае, если на одной из линий отсутствует напряжение.
Виртуальный COM-порт
Сервер последовательных интерфейсов позволяет по TCP/IP получить доступ к удаленным устройствам таким образом, что для прикладного ПО это будет выглядеть так, будто устройства подключены к физическому COM-порту.
Принцип работы виртуального COM-порта по сети Ethernet
Для этого на стороне клиента используется модуль ядра Linux и программа для обмена данными с сервером последовательных интерфейсов. В итоге для пользователя такое подключение выглядит как физический порт (устройство /dev/ttyADV0).
На данный момент Advantech выпускает драйвера виртуального COM-порта только для ОС Linux. Инструкция по сборке модуля ядра VCOM 2.0 на Ubuntu.
Также существуют бинарные пакеты драйвера под разные дистрибутивы: Linux Pseudo TTY
В веб-интерфейсе можно настроить параметры работы в данном режиме:
Дополнительные настройки. Можно вручную задать таймауты и т.д:
Настройки параметров последовательного интерфейса. В этом меню также можно изменить основной протокол (RS-232/422/485), для каждого порта.
Режим RFC 2217
Также доступен открытый протокол перенаправления COM-порта RFC 2217, представляющий собой расширенные команды для протокола Telnet. В этом режиме устройство принимает входящие подключения по TCP, в настройках можно указать порт для входящий соединений.
Режим P2P
Для сложных случаев, когда несколько устройств нельзя соединить напрямую, можно использовать два терминальных сервера в режиме прозрачного моста. Таким образом можно подключить удаленные устройства, используя в качестве транспорта TCP/IP.
Подключение двух удаленных устройств по последовательному протоколу через TCP/IP-транспорт
Таким образом можно программно переключать устройства между собой, соединять удаленные шины по RS-485 и делать много другое, используя все преимущества IP-сетей, включая радиомосты, виртуальные частные сети (VPN) и т.д. Передаваемые данные между двумя серверами можно дополнительно защитить от перехвата, используя шифрование на транспортном уровне.
Уведомления о событиях
Устройство позволяет настроить уведомления о событиях с помощью Email и SNMP Trap. MIB-файл для настройки SNMP-сервера доступен для каждого устройства.
События для уведомлений можно настроить вручную.
Логирование через Syslog
В веб-интерфейсе можно задать адрес удаленного Syslog-сервера для логирования. В лог записываются события подключения клиентов, ошибки аутентификации, статус LAN и последовательных портов и т.д.
Первичная настройка
Первичную конфигурацию сервера последовательных интерфейсов можно выполнить через утилиту EKI Device Configuration Utility. При этом утилита работает через ARP-пакеты и не требует настройки соответствующего IP-адреса на сетевом интерфейсе. Это значит, что можно задать любой IP-адрес устройству, без утраты доступа.
Заключение
Серверы последовательных интерфейсов позволяют обходить ограничения, которые накладывают физические протоколы, и легко масштабировать подключения. Режим P2P позволяет подключать устаревшие устройства, используя интернет в качестве транспорта, при этом обходиться без серверов.
Источник