- Программист — это звучит гордо
- Страницы
- вторник, 14 июня 2016 г.
- Оптимизация работы с SSD: Планировщики ввода/вывода в Linux
- Теоретическая часть
- Noop I/O Scheduler
- Deadline I/O Scheduler
- Anticipatory I/O Scheduler
- Complete Fair Queuing (CFQ) I/O Scheduler
- Выбор планировщика
- Практическая часть
- Тестирование
- Настройка Linux I / O Scheduler для твердотельных накопителей
- Настройка Linux I / O Scheduler для твердотельных накопителей
- Настройка планировщика ввода-вывода Linux
- Настройка производительности NuoDB
- Изменить планировщик ввода вывода linux
Программист — это звучит гордо
Знаниями нужно делиться, иначе они протухают.
Страницы
вторник, 14 июня 2016 г.
Оптимизация работы с SSD: Планировщики ввода/вывода в Linux
Теоретическая часть
Хотя я и упоминал о SSD, но что бы глубже понять тему прийдётся начинать с HDD. Их главная проблема долгое время доступа к произвольному месту на диске. Оно складывается из времени позиционирования головки на дорожке и время ожидания поворота диска на угол необходимый для доступа к сектору. Для понимания масштабов бедствия — переключение на другую дорожку в пределах одного цилиндра занимает порядка 1 миллисекунды, переход на соседний цилиндр 2-4 ms. Время оборота диска (7200 rpm) — составляет 8 ms. Для современных дисков время произвольного доступа колеблется от 2.5 до 16 ms — это время, за которое винчестер гарантированно выполнит операцию чтения или записи на любом участке магнитного диска. С проблемой активно борются производители жёстких дисков, например одна из применяемых оптимизаций — упреждающее чтение, в расчёте на то, что следующая команда чтения будет из этой же области диска.
Следующий нюанс — архитектура программ. Чтение обычно синхронная операция, пока мы не получили данные, продолжать работу мы не можем. А вот запись напротив чаще всего асинхронно и приложению не так важно когда реально будут записаны эти данные. Поэтому желательно, что бы запросы на чтение выполнялись как можно быстрее, а вот запись можно отложить на какое-то время.
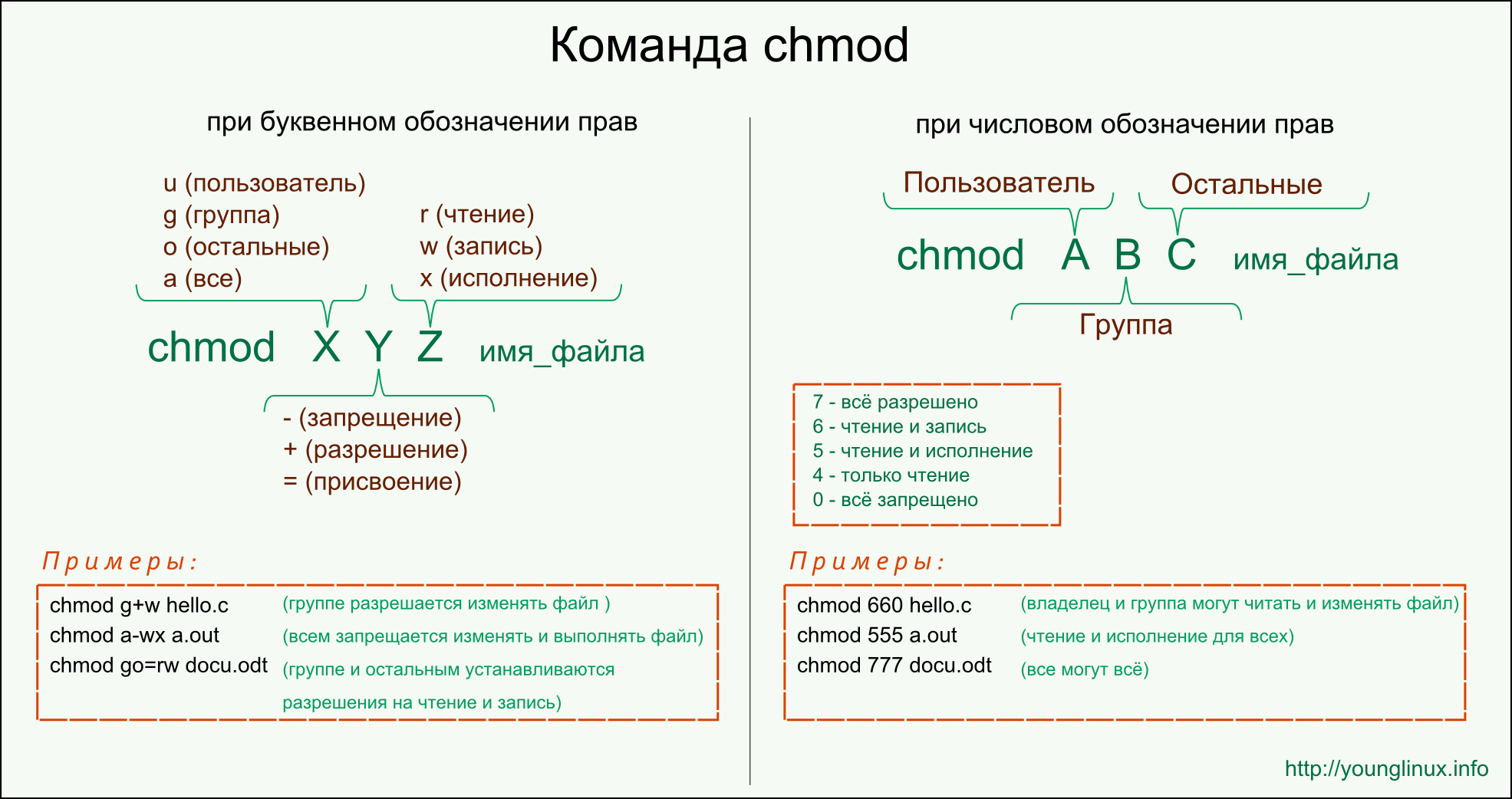
Теперь имея представление о проблемах, рассмотрим, как планировщики ввода/вывода их решают. В современных дистрибутивах обычно из коробки присутствуют 4 планировщика:
Noop I/O Scheduler
Deadline I/O Scheduler
Каждому входящему запросу назначается предельное время (deadline) через сколько он должен быть выполнен. Для чтения это по умолчанию 500 ms, для записи 5 сек. Все новые запросы пишутся в одну из двух очередей — FIFO очередь на чтение и FIFO очередь на запись. Таким образом в голове каждого из списков храниться запрос, у которого deadline ближе всего. Так же запрос вставляется ещё и в общую очередь, отсортированную так, что бы минимизировать кол-во перемещений головки диска (фактически по номеру блока).
При записи на диск, планировщик проверяет первые две очереди, если есть запросы с истёкшим deadline — выполняет их в первую очередь. В противном случае берёт запросы из общей, отсортированной, очереди.
Anticipatory I/O Scheduler
Упреждающий планировщик. Он пытается решить некоторые проблемы предыдущего. Как я уже говорил, приложения обычно читают данные с диска в синхронном режиме — прочитали кусок из файла и только потом запрашивают следующий. Это приводит к тому, что после выполнения первого запроса на чтение, планировщик переключается к выполнению других запросов и головка диска «уходит» в другое место. А приложение шлёт следующий запрос, который с большой долей вероятности расположен рядом с предыдущим. Если бы планировщик подождал немного, он бы смог быстро обслужить и этот запрос.
Вот такое ожидание этот планировщик и добавляет. Он после каждого запроса на чтение, 6 ms ждёт следующего запроса от приложения, если ничего не получил, продолжает работать как deadline scheduler.
Complete Fair Queuing (CFQ) I/O Scheduler
Выбор планировщика
Нет единого ответа на вопрос какой из планировщиков лучше. Каждый из них имеет сильные и слабые стороны и поэтому нужно смотреть на характер нагрузки, отношение операций записи к чтению и т.п. Разве что noop scheduler будет для HDD гарантированно плохим выбором.
Вот допустим Red Hat в своей статье называет лучшим CFQ и приводит такой график:

А IBM с этим мнением не согласена и считает, что Deadline лучше других:

Практическая часть
С теорией разобрались, переходим к практике. Стоит предупредить, что я проверял инструкцию ниже только на Arch Linux. И хотя я не использовал ничего специфичного, но гарантировать работу на всех дистрибутивах не могу, проверяйте сначала на виртуальной машине.
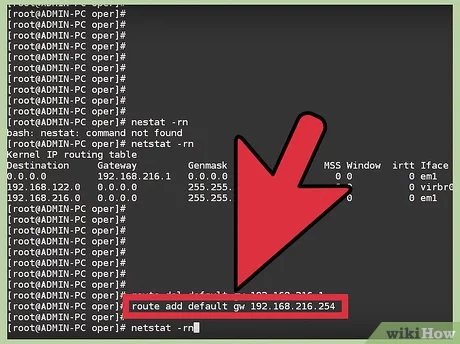
Посмотреть список поддерживаемых планировщиков, например для sda:
Стоит помнить, что выбранный планировщик вступит в действие не сразу, а через некоторое время. И работать настройка будет до перезагрузки. Что бы установить другой умолчательный планировщик для всех дисков, добавте параметр ядра «elevator=scheduler_name».
Покажу на примере GRUB и планировщика «deadline». Откройте «/etc/default/grub» и добавьте в «GRUB_CMDLINE_LINUX_DEFAULT» нужный параметр, у меня получилось вот так:
Тестирование
Сложная тема, для любого планировщика можно подобрать такой набор тестов, который покажет что именно он самый быстрый. Один лучше обслужит одно приложение читающее большие файлы, другой покажет свою мощь на множестве мелких параллельных чтений и т.д. Параметров который влияют на производительность неприлично много.
И если вы например проверите скорость копирования файлов, то результат покажет лишь как быстро с данным планировщиком копируются файлы. Если это у вас основной паттерн использования диска — то это адекватный тест, в противном случае он ни о чём.
Могу порекомендовать статью на тему, на мой взгляд очень обстоятельную. Там же вы найдёте методику тестирования при помощи утилиты fio. Пересказывать не буду, поскольку в статье и так всё достаточно хорошо описано.
Источник
Настройка Linux I / O Scheduler для твердотельных накопителей
Настройка Linux I / O Scheduler для твердотельных накопителей
Привет читатели Techblog!
Я собираюсь поговорить о настройке планировщика ввода-вывода Linux для увеличения пропускной способности и уменьшения задержки на SSD. Я также затрону еще одну интересную тему о настройке производительности NuoDB, указав хранилище для архива и каталогов журналов.
Настройка планировщика ввода-вывода Linux
Linux дает вам возможность выбрать планировщик ввода / вывода. Планировщик также может быть изменен без перезагрузки! В этот момент вы можете спросить: «Зачем мне вообще менять планировщик ввода-вывода?» Изменение планировщика имеет смысл, когда затраты на оптимизацию ввода-вывода (переупорядочение запросов ввода-вывода) не нужны и дороги. Этот параметр должен быть точно настроен для каждого устройства хранения. Лучшая настройка для SSD не будет хорошей настройкой для HDD.
Текущий планировщик ввода / вывода можно просмотреть, введя следующую команду:
Текущий планировщик ввода / вывода (в скобках) для / dev / sda на этом компьютере — CFQ , полностью честная очередь. Этот параметр стал стандартным в ядре 2.6.18 и хорошо работает для жестких дисков. Однако твердотельные накопители не имеют вращающихся пластин или магнитных головок. Алгоритмы оптимизации ввода / вывода в CFQ не применяются к твердотельным накопителям. Для твердотельных накопителей планировщик ввода-вывода NOOP может уменьшить задержку ввода-вывода и увеличить пропускную способность, а также исключить время ЦП, затрачиваемое на переупорядочение запросов ввода-вывода. Этот планировщик обычно хорошо работает на SAN, SSD, виртуальных машинах и даже на модных картах ввода-вывода Fusion. В этот момент вы, вероятно, думаете: «Хорошо, я продан! Как мне уже изменить планировщик?» Вы можете использовать команду echo, как показано ниже:
Чтобы увидеть изменения, просто перезапустите планировщик.
Обратите внимание, что noop теперь выбран в скобках. Это изменение носит временный характер и будет сброшено к планировщику по умолчанию, в данном случае CFQ, когда машина перезагрузится. Вам нужно отредактировать конфигурацию Grub, чтобы сохранить настройки навсегда. Однако это изменит планировщик ввода-вывода для всех блочных устройств. Проблема в том, что NOOP не является хорошим выбором для HDD. Я бы только навсегда изменил настройку, если бы на машине были только SSD.
На этом этапе вы изменили планировщик ввода-вывода на NOOP. Как вы знаете, если это имеет значение? Вы можете запустить сравнительный тест и сравнить числа (просто не забудьте очистить кэш файловой системы). Другой способ — взглянуть на вывод iostat. Запросы ввода-вывода проводят меньше времени в очереди с планировщиком ввода-вывода NOOP. Это можно увидеть в поле «await» от iostat. Вот пример более крупной операции записи с NOOP.
| Прибор: | SDA |
| rrqm / с | 0,00 |
| wrqm / с | 143819,00 |
| R / S | 6,00 |
| ж / с | 2881,00 |
| RKB / с | 24,00 |
| ВКБ / с | 586800,00 |
| avgrq-SZ | 406,53 |
| avgqu-SZ | 0,94 |
| Ждите | 0,33 |
| r_await | 3,33 |
| w_await | 0,32 |
| svctm | 0,11 |
| % Util | 31,00 |
Настройка производительности NuoDB
Теперь, когда вы узнали о планировщике ввода-вывода NOOP, я расскажу о настройке NuoDB с помощью SSD. Если вы прочли технические блоги, то узнаете, что для базы данных NuoDB есть два строительных блока: механизм транзакций, сокращенно TE, и менеджер хранилища SM. TE — это копия базы данных только в памяти (фактически часть базы данных). В результате SSD не поможет производительности TE, потому что он не сохраняет атомы на диск. SM содержит два модуля для записи на диск: архив и журнал. В архиве атомы хранятся на диске, когда параметр конфигурации архива указывает на файловую систему (по сравнению с HDFS и S3). Журнал, с другой стороны, синхронно записывает сообщения на диск. Если вы читаете пост в блоге о долговечности Возможно, вы помните, что параметр «Удаленная фиксация с ведением журнала» обеспечивает наивысший уровень надежности, но за счет более низкой скорости. Использование SSD в этой ситуации может значительно улучшить производительность.
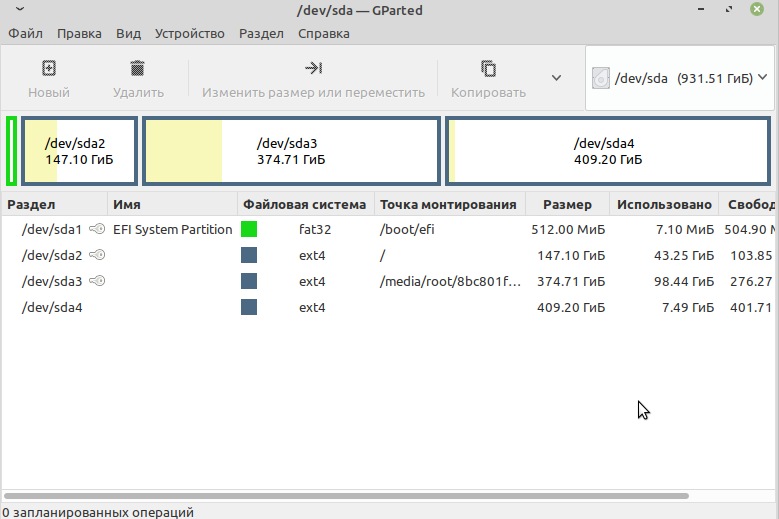
Чтобы настроить этот параметр, нам нужно создать каталог nuodb на SSD:
SSD в этом примере имеет точку монтирования / ssd на этом компьютере. Легко, правда? Я предполагаю, что вы уже установили планировщик ввода-вывода Linux для SSD на NOOP. Следующим шагом является настройка NuoDB для использования этого пути при создании каталога журнала. Журнал имеет прямую корреляцию с пропускной способностью транзакции, поскольку журнал должен завершить запись на диск, прежде чем SM отправит ACK для подтверждения транзакции в TE. Как насчет архива? Архив отделен от фиксации транзакции, атомы останутся в памяти и постепенно попадут на диск. Это будет очень мало влиять на TPS базы данных. В результате каталог архива можно разместить только на обычном жестком диске. Краткое руководство по настройке производительности — поместить журнал на SSD, а архив можно поместить на жесткий диск.
Важным моментом этой настроенной конфигурации является то, что только журнал находится на SSD. В результате твердотельный накопитель не обязательно должен быть одним из этих огромных дисков с ТБ. Стоимость твердотельных накопителей значительно упала в цене, и для данных журнала достаточно одного твердотельного накопителя емкостью 128 или 256 ГБ. Эта конфигурация должна соперничать с локальной эффективностью фиксации, которая является потрясающей, учитывая, что это самый высокий уровень долговечности! Я призываю вас попробовать и задать несколько вопросов.
Источник
Изменить планировщик ввода вывода linux
Это мой перевод вот этой статьи.
При переводе я немного сократил статью, убрав из нее повторения и очевидные вещи.
Введение
Наверняка всем известно, что ядро Linux является очень сложным. Оно может работать на широком спектре имеющегося оборудования: во встраиваемых устройствах (в том числе и тех, которые нуждаются в операционных системах реального времени), портативных устройствах, ноутбуках, рабочих станциях, серверах общего назначения, серверах баз данных, видео-серверах, DNS-серверах, на суперкомпьютерах различного масштаба, и т.д. Системы разного назначения предъявляют к ядру системы самые разные и порой противоречивые требования. Некоторые из них требуют, что система должна быть отзывчивой на все действия пользователя, не прерывая музыку, видео или работу прочих приложений, требующих внимания пользователя. В то же время, обязательно существуют требования к хорошей производительности системы ввода-вывода и для некоторых сфер применения эти требования очень высокие. Для обеспечения сбалансированного распределения ресурсов между пользователями и разными процессами, в ядре Linux используется концепция планировщиков.
Планировщики предназначены именно для того, о чем говорит их название — они планируют различные операции внутри ядра системы. Поскольку в данной статье мы рассматриваем только ввод-вывод, то и под термином «планировщик» далее будет пониматься только планировщик ввода-вывода. Далее будет рассмотрена общая концепция планировщиков ввода-вывода и возможные их параметры.
Основные идеи, заложенные в планирование ввода-вывода
Практически все приложения на Linux используют какие-либо операции ввода-вывода. Даже такое с виду простое занятие как веб-серфинг производит большое количество маленьких файлов, которые записываются на диск. Без планировщик, каждый раз когда происходит запрос на ввод-вывод, происходило бы взаимодействие с ядром и такие операции бы выполнялись немедленно. Более того, может возникнуть такая ситуация, когда вы можете получить огромное количество запросов на ввод-вывод, которое (чтобы удовлетворить все запросы пользователя) заставит головки диска буквально метаться по нему стороны в сторону. Еще важнее то, что со временем разница между производительностью жестких дисков и остальной системы выросла очень быстро, что означает предъявление ещё больших требований к вводу-выводу для обеспечения общей высокой производительности системы. Так, когда ядро должно обслужить прерывание — приостанавливается работа всех остальных приложений. Поэтому, со стороны это может выглядеть как снижение отзывчивости системы или даже как замедление ее работы.
Так каким же образом следует спланировать обслуживание запросов на ввод-вывод, чтобы при этом обеспечить высокую скорость и не жертвовать отзывчивостью системы? Ответ на данный вопрос, как и большинство других вещей, зависит от общей загрузки и назначения системы. В одних случаях было бы здорово производить операции ввода-вывода параллельно с другими. В других случаях, необходимо производить ввод-вывод как можно быстрее. Концепция планирования ввода-вывода (на самом деле это довольно старая концепция) и появилась для того, чтобы найти баланс между этими двумя крайними состояниями таким образом, чтобы одна операция не прерывала другую (по крайней мере, до тех пор пока это явно не будет нужно вам).
Планирование событий ввода-вывода несет в себе необходимость решения многих вопросов. К примеру, планировщику необходимо хранить поступившие запросы в специальной очереди. Каким образом он будет хранить эти события, возможно ли будет изменить порядок событий, сколько времени будут хранится эти события, будут ли выполняться все сохранённые события по достижению определенных условий или с какой-то периодичностью — все это очень важные аспекты работы планировщика. От того как именно реализованы перечисленные аспекты работы планировщика зависит общая производительность работы системы ввода-вывода и то, как воспринимается эта система пользователями.
Самое главное с чего следует начать при рассмотрении архитектуры планировщика или настройки существующих планировщиков — это определение назначения, функций и роли системы. Например, целевая система — рабочая станция, которая используется в основном для веб-серфинга, иногда для просмотра видео и/или прослушивания музыки, и может быть даже игр. Задача кажется простой, но тем не менее имеет свои подводные камни. Например, если вы смотрите видео, слушаете музыку или играете в игру, вы скорее всего не хотите, чтобы при этом возникали какие-то задержки или пропадали какие-то кадры, видео бы постоянно прерывалось и показывалось бы рывками. Или, как только вы приготовитесь снести голову какому-нибудь зомби-мутанту, система подвиснет как раз в момент вашего выстрела и когда она снова возобновит работу, вдруг окажется, что зомби уже опередил вас и ваш герой убит. И хотя «заикание» во время воспроизведения какой-нибудь музыки вполне может быть частью жанра, в большинстве случаев это сильно раздражает. Поэтому, если ваша целевая система представляет собой рабочую станцию, Вы возможно захотите как можно меньше задержек в ее работе и это имеет огромное влияние на алгоритм работы планировщика.
Одним из важных преимуществ, которое планирование ввода-вывода дает системе — является хранение различных событий в очереди и даже возможность ее (очереди) изменения для совершения отдельных операций ввода-вывода быстрее других. Поскольку скорость операций ввода-вывода может оказаться значительно медленнее, чем в других частей системы, перераспределение запросов на обращение к диску таким образом, чтобы минимизировать перемещение головок диска может повысить общую производительность работы системы. Новые файловые системы тоже могут работать с учетом некоторых из этих концепций, поэтому они вполне могут сами оптимизировать операции ввода-вывода с точки зрения скорости работы устройства хранения данных. Вы даже можете путем настройки самого планировщика эффективнее адаптировать систему к необычным свойствам SSD (твердотельные накопители не имеют головок чтения-записи по сравнению с традиционными жесткими дисками — прим. перев.).
Есть несколько типичных методов, которые используются планировщиками ввода-вывода:
- Слияние запросов: в рамках этой техники, запросы на чтение-запись схожего назначения объединяются для сокращения количества дисковых операций и увеличение длительности системных вызовов ввода-вывода (что, как правило, приводит к повышению производительности самого ввода-вывода).
- «Алгоритм лифта»: Запросы ввода-вывода упорядочиваются исходя из физического размещения данных на диске таким образом, чтобы головки диска как можно больше перемещались в одном направлении и как можно более упорядоченно.
- Переупорядочение запросов: Эта техника переупорядочивает запросы на основе их приоритета. Алгоритм реализации данной техники зависит от конкретного планировщика.
- Кроме того, почти все планировщики ввода-вывода учитывают фактор «ресурсного голодания», поэтому в итоге (рано или поздно) будут обслужены все запросы (имеется ввиду, что планировщик следит за тем, чтобы запрос на ввод-вывод слишком долго не находился в очереди, т.е. не «голодал» бы — прим.перев.).
В настоящее время в ядре Linux существует четыре планировщика ввода-вывода:
- NOOP
- Anticipatory
- Deadline
- CFQ (Completely Fair Queuing — алгоритм полностью честной очереди)
Планировщик NOOP
Планировщик NOOP (no-operate) является самым простым. Он помещает все входящие запросы ввода-вывода в простой буфер типа FIFO (First-In, First-Out — первый вошел, первый вышел) и затем просто запускает их на исполнение. Заметим, что это происходит для всех процессов, существующих в системе, независимо от типа запросов ввода-вывода (чтение, запись, поиск необходимой дорожки т.д.). Также он выполняет нечто подобное слиянию запросов (см. выше).
Согласно этой статье, планировщик NOOP «. использует минимальное количество инструкций процессора на операцию ввода-вывода для выполнения простейшей функциональности: слияние и сортировка запросов». Данный планировщик предполагает, что сами устройства хранения данных будут оптимизировать быстродействие операций ввода-вывода (например, внешний RAID-контроллер или SAN).
Потенциально, планировщик NOOP будет хорошо работать с устройствами хранения данных, которые не имеют механических частей для чтения данных (т.е. головок диска). Причина кроется в том, что данный планировщик не делает никаких попыток оптимизировать движение головок, выполняя простейшее слияние запросов, что также помогает повышению пропускной способности диска. Поэтому такие устройства хранения как флэш-диски, SSD-диски, USB-накопители и т.п., которые имеют очень малое время поиска данных (seek time) могут получить преимущество, используя планировщик NOOP.
Anticipatory IO Scheduler (Предполагающий планировщик)
Anticipatory IO Scheduler, как следует из названия, пытается предположить к каким блокам диска будут выполнены следующие запросы. Он выполняет слияние запросов, простейший однонаправленный алгоритм лифта, объединение (request batching) запросов на чтение и запись. После того как планировщик обслужил запрос на чтение-запись, он предполагает, что следующий запрос будет для последующего блока, приостанавливаясь на небольшое количество времени. Если такой запрос поступает, то он обслуживается очень быстро, поскольку головки диска находятся в нужном месте. Такой подход привносит незначительное замедление в работу системы ввода-вывода по причине необходимости ожидания следующего запроса. Однако этот недостаток может быть компенсирован увеличением производительности запросов к соседним областям диска.
Некоторые исследования показали, что anticipatory scheduler работает действительно хорошо при некоторых загрузках системы. Например, наблюдалось, что веб-сервер Apache может достигать увеличить свою пропускную способность до 71% с помощью данного планировщика. С другой стороны, существуют наблюдения, что данный планировщик вызывал замедление работы баз данных на 15%.
Deadline IO Scheduler (планировщик предельных сроков)
Deadline IO Scheduler был написан Дженсом Аксбо (Jens Axboe), широко известным разработчиком ядра. Основополагающим принципом его работы является гарантированное время запуска запросов ввода-вывода на обслуживание. Он сочетает в себе такие возможности как слияние запросов, однонаправленный алгоритм лифта и устанавливает предельный срок на обслуживание всех запросов (отсюда и такое название). Он поддерживает две специальные «очереди сроков выполнения» (deadline queues) в дополнение к двум отдельным «отсортированным очередям» на чтение и запись (sorted queues). Задания в очереди сроков выполнения сортируются по времени исполнения запросов по принципу «меньшее время — более раннее обслуживание — ближе к началу очереди». Очереди на чтение и запись сортируются на основе запрашиваемого ими номера сектора (алгоритм лифта).
Данный планировщик действительно помогает пропускной способности в случаях чтения с секторов с большим номером блока (на внешних областях диска — прим.перев.). Операции чтения могут иногда заблокировать приложения, поскольку пока они выполняются, приложения ждут их завершения. С другой стороны, операции записи могут выполняться гораздо быстрее, поскольку они производятся в дисковый кэш (если только вы не отключили его использование). Более медленные операции чтения с внешних областей диска перемещаются к концу очереди, а более быстрые операции чтения с более близких областей поступят на обслуживание раньше. Такой алгоритм планировщика позволяет быстрее обслужить все запросы на чтение-запись, даже если существуют запросы на чтение с дальних областей диска.
Схема работы планировщика достаточно прямолинейна. Планировщик сначала решает какую очередь использовать первой. Более высокий приоритет установлен для операций чтения, поскольку, как уже упоминалось, приложения обычно блокируются при запросах на чтение. Затем он проверяет истекло ли время исполнения первого запроса. Если так — данный запрос сразу же обслуживается. В противном случае, планировщик обслуживает пакет запросов из отсортированной очереди. В обоих случаях, планировщик также обслуживает пакет запросов следующий за выбранным в отсортированной очереди.
Deadline scheduler очень полезен для некоторых приложений. В частности, в системах реального времени используется данный планировщик, поскольку в большинстве случаев, он сохраняет низкое время отклика (все запросы обслуживаются в короткий временной период). Также было отмечено, что он также хорошо подходит для систем баз данных, которые имеют диски без поддержки TCQ.
CFQ IO Scheduler (планировщик с полностью честной очередью)
CFQ (Completely Fair Queue — планировщик с полностью честной очередью) IO scheduler в настоящее время является планировщиком по умолчанию в ядре Linux. Он использует и слияние запросов и алгоритм лифта. При работе CFQ синхронно размещает запросы на ввод-вывод от процессов в ряд очередей на каждый процесс (per-process queues). Затем он выделяет отрезки времени (timeslices) для каждой очереди на доступ к диску. Длина отрезков времени и количество запросов в очереди, которые будут обслужены, зависит от приоритета ввода-вывода конкретного процесса. Асинхронные запросы от всех процессов объединяются в несколько очередей по одной на каждый приоритет.
Дженс Аксбо (Jens Axboe) является автором планировщика CFQ и включает то, что Дженс называет «алгоритмом лифта Линуса». Добавление данной возможности произошло при необходимости внесения функций для предотвращения «голодания процессов» в наиболее неблагоприятной ситуации, которая может произойти при чтении со внешних дорожек диска. Также приведенная ссылка указывает на хорошую дискуссию по разработке планировщика CFQ и сложностях его дизайна (также в нем обсуждается дизайн deadline scheduler — очень рекомендую это прочесть).
CFQ предоставляет пользователям (процессам) конкретного устройства хранения данных необходимое количество запросов ввода-вывода для определённого промежутка времени. Это сделано для многопользовательских систем, так как все пользователи в таких системах получат один и тот же уровень отклика. Более того, CFQ достигает некоторых из характеристик anticipatory scheduler по хорошей пропускной способности, поскольку позволяет обслуживаемой очереди простаивать какое-то время по завершению выполнения запроса на ввод-вывод в ожидании запроса, который может оказаться близким к только что выполненному запросу (и к тому же позволяет настройку своих параметров — прим. перев.).
Переключение планировщиков
Ядра Linux версии 2.6 фактически позволяют вам изменять планировщик ввода-вывода несколькими способами. Например, вы можете изменить планировщик по умолчанию для системы в целом используя опцию «elevator=» в строке параметров ядра. Это можно сделать вручную во время загрузки или может в конфигурационном файле Grub.
Для изменения планировщик ввода-вывода по умолчанию отредактируйте файл конфигурации Grub /boot/grub/menu.lst , добавив опцию «elevator=» в конец конца строки. Например, вы можете изменить его с CFQ на deadline добавив параметр “elevator=deadline” в строку, которая начинается словом «kernel».
Второй способ изменить планировщик позволяет менять его «на лету» для конкретных устройств. Например, вы можете определить, какой планировщик ввода-вывода используется, посмотрев содержимое файла ”/sys/block/[device]/queue/scheduler”, где [device] — имя соответствующего устройства. Например, на моем ноутбуке:
#cat /sys/block/sdb/queue/scheduler
noop anticipatory deadline [cfq] NOOP
Обратите внимание, что текущий планировщик — CFQ. Вы можете изменить планировщик командой echo передав ей имя желаемого планировщика и переадресовав ее вывод в соответствующий файл устройства — “/sys/block/[device]/queue/scheduler”. Например, я могу изменить планировщик на моем ноутбуке следующим образом:
# echo deadline > /sys/block/sdb/queue/scheduler
root@laytonjb-laptop:
# cat /sys/block/sdb/queue/scheduler
noop anticipatory [deadline] cfq
Обратите внимание, теперь планировщик изменился на deadline. Когда мы меняем планировщик, «старый» планировщик выполняет все поступившие запросы, а затем ядро переключается на новый (правда же Linux великолепен?).
Заключение
Эта статья всего лишь краткое обозрение планировщиков ввода-вывода в Linux. Современные системы могут иметь большое число пользователей, интенсивную нагрузку на подсистему ввода-вывода, требовать высокий уровень отзывчивости, требования реального времени, плюс большое количество дисков и/или файловых систем. Именно здесь на помощь приходит планировщик ввода-вывода.
Планировщик ввода-вывода не является новой идеей, но тем не менее он очень важен. Эти планировщики могут быть разработаны для работы с системой ввода-вывода так как пожелаете вы. В настоящее время в ядре Linux существует четыре планировщика ввода-вывода: NOOP, deadline, anticipatory и CFQ. Различные аспекты их работы были обсуждены в этой статье на достаточно высоком уровне.
В этой статье не рассматривалась настройка различных планировщиков под конкретную нагрузку. Для ознакомления с этой темой вы можете изучить документацию, которая поставляется с исходниками текущего ядра. Например, на моем ноутбуке, документацию можно найти в каталоге /usr/src/linux-source-2.6.27/Documentation/block. Кроме того, по настройке планировщиков в Интернет существует большое количество статей.
Одна простая вещь, которую вы можете сделать — это попробовать поменять планировщик ввода-вывода, связанный с определенным устройством (было рассмотрено выше). Это довольно легко сделать и может привести к некоторым интересным результатам (прозрачный намек 😉 ).
Источник